|
Abbreviation |
Term |
Meaning / Bedeutung |
|
|
|
|
|
A/C |
Aeroplane |
Flugzeug |
|
A/P |
Aerodrome |
Flugplatz |
|
ACM |
Additional Crew Member |
zusätzliches Besatzungsmitglied |
|
ADD |
additional |
zusätzlich |
|
AGL |
Aerodrome Ground Level |
Flugplatzhöhenreferenzlinie |
|
AIP |
Aeronautical Information Publication |
offizielle Luftfahrtveröffentlichung |
|
AIS |
Aeronautical Information Service |
Flugberatungsdienst |
|
ALTN |
Alternative |
Ausweichmöglichkeit |
|
AOC |
Air Operator Certificate |
Luftverkehrsbetreiberzeugnis |
|
ATIS |
Automatic Terminal Information Service |
Automatische Ausstrahlung
von |
|
ATPL |
Airline Transport Pilot Licence |
Luftfahrerschein für |
|
ATS |
Air Traffic Service |
Flugverkehrsdienst |
|
ATSFPL |
Air Traffic Service Flightplan |
ATS-Flugplan |
|
AVI |
Live Animals |
Lebende Tierfracht |
|
AWO |
All Weather Operations |
Allwetterflugbetrieb |
|
|
|
|
|
BAL |
Ballast |
Extragewicht zur Vermeindung |
|
BLK |
Blocked Seats |
unbenutzbare Sitzplätze |
|
BMV |
Bundesministerium für Verkehr |
Bundesdeutsches Ministerium
für |
|
|
|
|
|
CA |
Cabin Attendant |
Flugbegleiter |
|
CAS |
Calibrated Airspeed |
am Fahrtmesser angezeigte |
|
CAB |
Cabin Crew |
Kabinenbesatzung |
|
CAT I |
Category I (one) approach |
Betriebsstufe 1 Instrumenten- |
|
|
|
|
|
CAT |
Clear Air Turbulence |
Klarluftturbulenz |
|
CDC |
Chef De Cabin |
Kabinenbesatzungsvorgesetzter |
|
CDL |
Configuration Deviation List |
Änderungsliste an
Ausrüstungs- |
|
CHD |
Child |
Kind mit Alter über 2 Jahre |
|
CM 1 |
left seat pilot |
links sitzender Pilot |
|
CM 2 |
right seat pilot |
rechts sitzender Pilot |
|
CMD |
command |
Verantwortung |
|
COC |
Cockpit Crew |
Cockpitbesatzung |
|
CP |
Captain / Commander |
Kapitän |
|
CPL |
Commercial Pilot Licence |
Luftfahrerschein für |
|
CRM |
Crew Resource Management |
Konzept zur optimalen Aus- |
|
CTOT |
Coordinated Take Off Time |
vorgegebenes Zeitfenster für |
|
|
|
|
|
DEP |
Departure |
Abflug |
|
DGR |
Dangerous Goods Regulations |
Gefahrguttransportbe- |
|
DH |
Dead-Heading |
Besatzungsmitglied auf Dienst- |
|
DIP |
Diplomatic Mail |
Diplomatenpost |
|
DOW |
Dry Operating Weight |
Leergewicht des Flugzeugs ohne |
|
DVO |
Durchführungsverordnung |
offizielle Anweisung zur |
|
|
|
|
|
E |
Examiner |
Prüfer |
|
EASA |
Europian Aviation Safety Authority |
Europäische Behörde
für |
|
ECAC |
Europian Civil Aviation Conference |
Europäische Zivilluftfahrt- |
|
EST |
estimated |
erwartet |
|
ETA |
Estimated Arrival Time |
erwartete Ankunftszeit |
|
|
|
|
|
FAA |
Federal Aviation Authority |
US-Amerikanische |
|
FDR |
Flight Data Recorder |
Flugdatenschreiber |
|
FDT |
Flight Duty Time |
Flugdienstzeit |
|
FI |
Flight Instructor |
Fluglehrer |
|
FIS |
Flight Information Service |
Fluginformationdienst |
|
FO |
First Officer |
1. Offizier / Copilot |
|
FOO |
Flight Operations Officer |
Flugbetriebsmitarbeiter |
|
FTO |
Flight Training Organisation |
Ausbildungsorgnisation für |
|
FPL |
Flightplan |
Flugdurchführungsplan |
|
|
|
|
|
G/A |
Go Around |
Durchstartemanöver |
|
GPWS |
Ground Proximity Warning System |
Bodenannährungswarnsystem |
|
GS |
Ground Speed |
Geschwindigkeit über Grund |
|
|
|
|
|
HOT |
Hold Over Time |
Zeit der Wirksamkeit
von |
|
|
|
|
|
IAS |
Indicated Airspeed |
am Fahrtmesser angezeigte |
|
IFR |
Instrument Flight Rules |
Instrumentenflugregeln |
|
INF |
Infant |
Kind mit Alter unter 2 Jahren |
|
INOP |
inoperative |
technisch unbrauchbar |
|
IP |
Instructor Pilot |
Einweisungsberechtigter |
|
IR |
Instrument Rating |
Instrumentenflugberechtigung |
|
ISA |
International Standard Atmosphere |
internationale Definition
einer |
|
|
|
|
|
JAA |
Joint Aviation Authority |
Gemeinschaft der europäischen |
|
JAR |
Joint Aviation Regulations |
Bestimmungen der JAA |
|
JAR-FCL |
Joint Aviation Regulations |
Bestimmungen der JAA |
|
JAR-OPS |
Joint Aviation Regulations |
Bestimmungen der JAA |
|
|
|
|
|
KCAS |
Calibrated Airspeed [kts] |
berichtigte Fahrtmesseranzeige |
|
KIAS |
Indicated Airspeed [kts] |
am Fahrtmesser angezeigte Fluggeschwindigkeit in Knoten |
|
|
|
|
|
LBA |
Luftfahrt Bundes Amt |
Luftfahrtbundesamt |
|
LoA |
List of Aerodrome |
Liste der für
das |
|
LTB |
|
|
|
LuftBO |
|
|
|
LuftVO |
|
|
|
|
|
|
|
MCC |
Multi Crew Concept |
Konzept zur Zusammenarbeit |
|
MEDA |
Medical Case |
medizinischer (Not-)Fall |
|
MEL |
Minimum Equipment List |
Liste der geringstmöglichen |
|
METAR |
Meteorological Aerodrome Report |
aktueller Flugplatzwetterbericht |
|
MFPL |
Manual Flightplan |
handgefertigter |
|
MLAW |
Maximum Landing Weight |
maximal strukturell zulässiges |
|
MPLD |
Maximum Payload |
maximal zulässige Menge an |
|
MTOW |
Maximum Take-Off Weight |
maximal zulässiges Startgewicht |
|
MZFW |
Maximum Zero Fuel Weight |
maximal strukturell zulässiges |
|
|
|
|
|
N/A |
Not Applicable |
nicht anwendbar |
|
NAA |
National Aviation Authority |
nationale Zivilluftfahrtbehörde |
|
NAVKIT |
Navigation package |
Koffer mit Navigationsunterlagen, |
|
NIL |
No Items Listed |
keine Angabe |
|
NOOP |
No Operation |
kein Flugbetrieb |
|
NOTOC |
Dangerous goods Notification
To |
Formblatt, das die geladenen |
|
|
|
|
|
OAT |
Outside Air Temperature |
Außentemperatur |
|
OCC |
Operations Control Center |
Flugbetriebseinsatzleitung |
|
OCO |
Operations Control Officer |
Flugbetriebseinsatzmitarbeiter |
|
OM |
Outer Marker |
Voreinflugzeichen |
|
OM-A |
Operations Manual Part A |
Operations Manual Teil
A |
|
ÖM-B |
Operations Manual Part B |
Operations Manual Teil B |
|
OM-C |
Operations Manual Part C |
Operations Manual Teil
C |
|
OM-D |
Operations Manual Part D |
Operations Manual Teil
D |
|
|
|
|
|
PF |
Pilot Flying |
der den Flug durchführende Pilot |
|
PNF |
Pilot Not Flying |
der dem PF assistierende Pilot |
|
PLOG |
Pilot Logbook |
persönliches Flugbuch
zur |
|
PPL |
Privat Pilot Licence |
Luftfahrerschein für Privatpiloten |
|
PSGR |
Passenger |
Passagier (-e) |
|
|
|
|
|
QM |
Quality Management |
Qualitätskontrolle |
|
|
|
|
|
R/C |
Rate of Climb |
Steigrate |
|
R/D |
Rate of Descent |
Sinkrate |
|
R/H |
Right Hand |
rechts |
|
RF |
Registered Facility |
registrierte Ausbildungsein- |
|
RFC |
Radio Facility Chart |
Navigationskarte mit Abbildund |
|
RVR |
Runway Visual Range |
elektronisch gemessene Start-, |
|
RWY |
Runway |
Start-, Landebahn |
|
|
|
|
|
SAT |
Still Air Temperature |
gemessene Lufttemperatur in |
|
STD |
Scheduled Time of Departure |
planmäßige Abflugzeit |
|
SFS |
Siebertz Flight Service |
Name des |
|
|
|
|
|
T/O |
Take-Off |
Start |
|
TAF |
Terminal Aerodrome Forecast |
Flugplatzwettervorhersage mit |
|
TAS |
True Airspeed |
wahre Fluggeschwindigkeit |
|
TAT |
Total Air Temperature |
gemessene Lufttemperatur
mit |
|
TC |
Training Commander |
Trainingskapitän |
|
TDZ |
Touch Down Zone |
Landezone |
|
TLB |
Technical Logbook |
technisches Bordbuch |
|
TNG |
Training |
(Flug-) Training |
|
TOC |
Top Of Climb |
errechneter Punkt, an dem |
|
TOD |
Top Of Descent |
errechneter Punkt, an dem Sink- |
|
TRI |
Type Rating Instructor |
Simulator-Fluglehrer |
|
TRTO |
Type Rating Training Organisation |
Flugschule für |
|
|
|
|
|
UM |
Unaccompanied Minor |
unbegleitetes Kind |
|
UTC |
Universal Time Coordinated |
koordinierte Weltzeit |
|
|
|
|
|
VA |
Manoevering Airspeed |
Fluggeschwindigkeit, bei der alle |
|
|
|
|
|
VFE |
Flap Extended Airspeed |
zulässiger Geschwindigkeits- |
|
VFR |
Visual Flight Rules |
Sichtflugregeln |
|
VIS |
Visibility |
(Flug-) Sicht |
|
VNE |
Never Exceed Airspeed |
maximal zulässige |
|
VNO |
Normal Operating Airspeed |
normaler Fluggeschwindigskeits- |
|
VR |
Rotation Speed |
Geschwindigkeit, bei der beim |
|
VS |
Stalling Airspeed |
Fluggeschwindigkeit, bei der die |
|
VS0 |
Stalling Airspeed Flaps Extended |
Fluggeschwindigkeit, bei der mit |
|
VX |
Best Angle Airspeed |
Fluggeschwindigkeit für besten |
|
VY |
Best Rate Airspeed |
Fluggeschwindigkeit für beste |
|
V1 |
Descision Speed |
Entscheidungsgeschwindigkeit |
|
V2 |
Final Climb Airspeed |
Fluggeschwindigkeit für Steig- |
|
|
|
|
|
WAB |
Weight And Balance |
Beladung und Schwerpunkt |
|
WCH |
Wheelchair |
Rollstuhl |
|
WHO |
World Health Organisation |
Weltgesundheitsorganisation |
|
WX |
Weather |
Wetter |
|
|
|
|
|
X |
Cancel |
streiche |
|
|
|
|
|
Y-FPL |
Y-ATS-Flightplan |
ATS-Flugplan mit Flugdurch- |
|
|
|
|
|
Z-FPL |
Z-ATS-Flightplan |
ATS-Flugplan mit Flugdurch- |
Umrechnungen (näherungsweise)
m/s * 2 ~ kt
m/s
* 4 - 10 % ~ km/h
m/s * 200 ~ ft/min
Imp. Gall. * 4 +
10 % ~ Liter
US Gall. * 4 - 5 % ~ Liter
m * 3 + 10 % ~
ft
ft * 0,3 ~ m
NM * 2 - 10 % ~ km
kg * 2 + 10 %
~ lbs
lbs * 0,5 - 10 % ~ kg
Q-Gruppen
|
Q-Gruppe |
Bedeutung |
|
QNH |
Unter Bedingungen der Standardatmosphäre
|
|
QFE |
Am Meßort herrschender
Luftdruck |
|
QNE |
Luftdruck 1013 hPa |
|
QFF |
Unter den tatsächlich herrschenden
Bedingungen |
|
QDM |
Mißweisende Peilung zur Station |
|
QDR |
Mißweisende Peilung von der Station |
|
QUJ |
Rechtweisende Peilung zur Station |
|
QTE |
Rechtweisende Peilung von der Station |
|
QFU |
Mißweisende Landbahnrichtung |
Basic Instruments
Zu Beginn der Ausbildung werden Übungen geflogen, die den Flugschüler mit dem Flugzeug vertraut machen und ihn in die Lage versetzen, das Flugzeug im Normalflug und in besonderen Flugzuständen sicher zu beherrschen.
Die Grundübungen sollten während der Einführung in der ersten Stunde mit Sicht nach außen geflogen werden. Das ermöglicht die Größe der Bewegungen des Flugzeuges mit den dazugehörigen Anzeigen am künstlichen Horizont (Attitude Indicator, Al) und den anderen Instrumenten zu vergleichen. Dadurch wird aufgezeigt, dass bereits kleine Steuerbewegungen und kleine Änderungen der Anzeige am künstlichen Horizont große Auswirkungen auf das Flugzeug haben. Des Weiteren ist zu beachten, dass jede Änderung der Fluglage oder der Triebwerksleistung Korrekturen um jede Achse des Flugzeuges nach sich ziehen. Deshalb sollten gleich von Beginn der Ausbildung an frühzeitige und dadurch kleine Korrekturen angestrebt werden.
Nach dieser Übung ist der Instrumentenflug ohne Sicht nach außen durchzuführen. Der Übergang zum Instrumentenflug soll nach dem Abheben beginnen und entweder beim Einflug in die Platzrunde oder bei Erreichen der Entscheidungshöhe bzw. Sinkflug Mindesthöhe enden.
Die Längsneigung (Pitch) und die Triebwerksleistung (Power) sind der Schlüssel für die Kontrolle des Flugzeuges sowohl im Geradeaus- und Kurvenflug, als auch bei Steig- und Sinkflügen. Da das Variometer nur eine momentane Tendenz verspätet anzeigt, ist der Höhenmesser neben dem künstlichen Horizont die zuverlässigere Anzeige zur Kontrolle der Bewegung des Flugzeuges um die Querachse (Pitch) und damit der Flughöhe. Alle Manöver werden sauber ausgetrimmt geflogen, d.h. durch Änderung der Fluglage oder der Triebwerksleistung im Höhenruder entstandene Steuerdrücke werden mittels der Höhenrudertrimmung neutralisiert. Auf keinen Fall dürfen Korrekturen um die Querachse mit der Trimmung ausgeführt werden, weil das Flugzeug dadurch um die Querachse übersteuert wird.
Vor einer Kursänderung wird der Heading-Pointer auf das neue Heading gesetzt. So dient er zum einen als optische Hilfe, andererseits steuert er, wenn vorhanden, Autopilot und Flight-Guidance Systeme in der Heading-Mode. Der Heading-Pointer steht immer auf dem Heading, der gesteuert werden soll.
Kurskorrekturen bis 300 werden mit einer Querneigung geflogen, die der Hälfte der Größe der Korrektur entspricht. Größere Kursänderungen werden mit Standard Rate (3°/sec) durchgeführt.
Das Beenden von Kurven erfolgt bei Erreichen von einem Drittel der Querneigung in Grad vor dem vorgegebenen Kurs.
Das Beenden von Steig- oder Sinkflügen wird bei 10% der Steig- oder Sinkrate in Fuß vor Erreichen der vorgegebenen Höhe begonnen. (500 ft Steig- oder Sinkrate: Beginn des Level-Off 50 ft vor der Zielhöhe). Die Triebwerksleistung muss entsprechend den Richt- bzw. Erfahrungswerten so eingestellt werden, dass die jeweils vorgegebene Geschwindigkeit eingehalten wird. Muss nach einem Level-Off beschleunigt werden, wird die für die geforderte Geschwindigkeit nötige Soll-Power erst gesetzt, wenn diese erreicht ist.
Bei Abweichungen von einer vorgegebenen Höhe muss die Korrektur sowohl mit der Pitch als auch mit einer entsprechenden Änderung der Triebwerksleistung durchgeführt werden. Die Größe der Korrektur ist abhängig von der Größe der Abweichung in der Höhe. Sind zur Korrektur größere Steigflüge erforderlich, muss u.U. Climb-Power gesetzt werden. Bei den erforderlichen Steig- und Sinkflügen ist die vorgegebene Geschwindigkeit möglichst einzuhalten.
Mit zunehmender Übung sind unter Beachtung des Wetters und der Flugeigenschaften des verwendeten Musters. die folgenden Toleranzen anzustreben und in der Prüfung geforderts:
Kurse: Bei Geradeausflug im Horizontal-, Sink- und Steigflug sowie bei Beenden von Kurven +/- 5°, mit simuliertem Triebwerksausfall bei mehrmotorigen Flugzeugen +/- 10°
Flughöhen: Bei Übergang vom Steig- oder Sinkflug in den Horizontalflug +/- 50 ft, bei Veränderung der Triebwerksleistung im Horizontalflug +/- 50ft, bei simuliertem Triebwerksausfall bei mehrmotorigen Flugzeugen +/- 100 ft und in allen übrigen Flugzuständen +/- 100 ft.
Geschwindigkeiten:
Sichere Geschwindigkeit V2 bis + 10 kt, sichere
Anfluggeschwindigkeit Vref + 10 kt und in allen anderen
Flugzuständen -5 kt.
(Anmerkung: Korrekturen für Wind
sind hier nicht berücksichtigt. Die Vtgt wird immer
die Bezugsgröße für o.g. Toleranz sein).
Zeit: Bei Kurven sowie Steig- oder Sinkflug +/- 10% der berechneten Zeit.
Instrument Take Off
- Die Before Take-off und Line up Items sind erledigt und die Checklisten sind gelesen.
- Take-off und Emergency Briefing sind durchgeführt.
- Der Kompass wird mit der Rwy- Direction verglichen, der Heading Bug wird immer auf das Magnetic Bearing der Startbahn eingestellt. Die Differenz muss man sich merken. Sie darf das Limit von +/- 5° nicht überschreiten.
Nach der Startfreigabe werden die Bremsen gehalten und 20" Ladedruck eingestellt. Nach Überprüfen der Triebwerksinstrumente werden die Bremsen gelöst und zügig Takeoff Power gesetzt. Beim Rollen wird die Richtung am Kompass mit dem Seitenruder gehalten. Dabei ist die vorher festgestellte Differenz zwischen Kompassanzeige und dem Rwy-MC zu beachten. Das Querruder wird, der Windgeschwindigkeit entsprechend, in den Wind ausgelenkt.
Bei Erreichen der Rotation Speed nimmt der Pilot Flying die Hand von der Throttle an das Steuer und rotiert das Flugzeug in die Initial Climb Attitude. Dabei ist das Querruder so in die Neutralstellung zurückzuführen, dass die Tragflächen waagerecht bleiben.
Wenn Höhenmesser und Variometer "Positive Rate of Climb“ anzeigen, wird das Fahrwerk eingefahren. Ab 300 ft wird das für den Departure Track errechnete Heading eingenommen. Dabei ist das Banklimit von 15° unterhalb von 500 ft über Grund zu beachten. Die Attitude wird so korrigiert, dass die Initial Climb Speed eingehalten wird. Frühestens bei 400 ft GND wird die Climb Power gesetzt.
Geradeausflug mit konstanter Geschwindigkeit
Es wird ein Geradeausflug z.B. mit Reisegeschwindigkeit oder mit Holding-Speed eingenommen. Dabei soll die Längsneigung des Flugzeuges am Künstlichen Horizont so gehalten werden, daß die Höhe konstant bleibt. Das Variometer ist zur Höhenkontrolle nur bedingt geeignet, da die Anzeige nachhinkt und über den gegenwärtigen Flugzustand wenig aussagt. Die Triebwerksleistung (Power) wird zunächst nach den Richtwerten für die geforderte Geschwindigkeit eingestellt und so korrigiert, dass auch die Geschwindigkeit konstant bleibt. Für diese Geschwindigkeit muss das Flugzeug sauber ausgetrimmt werden. Abweichungen von der Höhe werden mit Pitch und Power korrigiert. Die vorgegebene Geschwindigkeit sollte während der Korrekturen eingehalten werden.
Kurven mit definierter Querneigung
Ziel der Übung ist es, einen stabilisierten Kurvenflug mit definierter Querneigung, Geschwindigkeit und Höhe zu erreichen. Dies erfordert eine etwas erhöhte Triebwerksleistung um den zusätzlichen Widerstand während des Kurvens auszugleichen und ein sauberes Austrimmen des Flugzeuges, sowie das Einhalten einer konstanten Querneigung.
Standard Rate Turn
Diese Übung wird wie die bei vorgenannte Übung geflogen, jedoch wird die Querneigung an die Geschwindigkeit angepasst, um eine konstante Drehbewegung von 3°/sec um die Hochachse zu erreichen. Die ICAO empfiehlt, alle Drehungen des Flugzeugs mit dieser Drehgeschwindigkeit durchzuführen, solange dabei die maximal zulässige Querneigung von 25° nicht überschritten wird. Die für den Rate-One-Turn zu fliegende Querneigung ist abhängig von der Eigengeschwindigkeit TAS. Die Drehgeschwindigkeit (Rate of Turn) wird fortlaufend mit der Stoppuhr kontrolliert und die Querneigung entsprechend angepasst. Die Stoppuhr wird gestartet, wenn auf dem Directional Gyro der Beginn der Drehung.angezeigt wird. Die benötigte Querneigung lässt sich nach folgender Faustformel ermitteln:
Bankangle = (TAS/10)+7 TAS in kt
Bei einmotorigen Flugzeugen und mehrmotorigen Flug zeugen mit Motoren die in die gleiche Richtung drehen, wird für die gleiche Drehgeschwindigkeit des Flugzeuges um die Hochachse bei Kurven in die Drehrichtung des Propellers etwas mehr Bank benötigt. Gründe hierfür sind Torque Effect, Precession, Slipstream und Prop. Factor.
Geradeausflug mit Änderung von Geschwindigkeit und oder Konfiguration
Mit diesen Übungen wird die Auswirkung von Geschwindigkeitsänderungen auf die Pitch, sowie der Einfluss von Fahrwerk und Landeklappen sowohl auf die Pitch als auch auf die Flugleistung demonstriert.
Die Geschwindigkeit wird bis zur Vref für Klappen in Landestellung reduziert und das Flugzeug für diese Geschwindigkeit ausgetrimmt. Kurs und Höhe sind stabil. Das Fahrwerk und die Landeklappen bleiben eingefahren. Jetzt wird die Triebwerksleistung für den Steigflug (Climb Power) gesetzt und während der Beschleunigung das Flugzeug auf Kurs und Höhe gehalten. Der Steuerdruck wird, wie erforderlich, mit der Trimmung abgebaut, bis sich das Flugzeug in seiner Endgeschwindigkeit stabilisiert. Während der Übung ist besonders auf die Änderung von Pitch und Yaw analog zu Geschwindigkeit und Power zu achten. Die Trimmung wird nur verwendet um entstandene Steuerdrücke auszugleichen.
Aus der Reisegeschwindigkeit wird die Power so weit zurückgenommen, dass das Flugzeug unterhalb der Vfe z.B. mit Holding Speed, auf Kurs und Höhe mit konstanter Geschwindigkeit stabil ausgetrimmt fliegt. Nun werden die Landeklappen und das Fahrwerk schrittweise in der Reihenfolge Flaps- Gear- Flaps- (Flaps) ausgefahren und das Flugzeug im Horizontalflug in der jeweiligen Vref stabilisiert und ausgetrimmt. Die Übung wird mit einem Durchstart-Manöver (Go-around) im geraden Horizontalflug und mit Erreichen der Reisegeschwindigkeit beendet.
Bei dieser Übung ist auf die Änderung der Pitch zu achten, besonders beim Fahren des Fahrwerkes und der Landeklappen, sowie auf die erforderlichen Korrekturen um die Hochachse bei Veränderung der Triebwerksleistung, die besonders im unteren Geschwindigkeitsbereich, gut zu erkennen sind.
Merke: Flaps down - Nose down; Flaps up - Nose up.
Steig- und Sinkflüge mit definierter Geschwindigkeit und fester Leistungseinstellung
Die Geschwindigkeit wird z.B. bei der Holding Speed stabilisiert und die Power dann auf einen zuvor bestimmten Wert gesetzt, wobei die Geschwindigkeit durch Absenken der Flugzeugnase für den Sinkflug, oder Anheben derselben für den Steigflug, beibehalten wird. Die Geschwindigkeit wird im weiteren Verlauf über Korrekturen um die Querachse (Pitch) konstant gehalten.
Steig- und Sinkflüge mit definierter Geschwindigkeit und definierter Sink- oder Steigrate
Die Geschwindigkeit wird bei der Holding Speed stabilisiert. Der Sinkflug wird durch Setzen der Power auf einen bekannten Richtwert und das Absenken der Flugzeugnase um einen bestimmten Wert eingeleitet, um 500 ft/min Sinken mit gleichbleibender Geschwindigkeit zu erreichen. Im Gegensatz zu Übungen mit fester Power und konstanter Geschwindigkeit wird hier die Sinkrate mit Korrekturen um die Querachse (Pitch) und die Geschwindigkeit mit Korrekturen der Power eingehalten. Für den Steigflug wird analog verfahren. Die Sink- oder Steigrate wird mit der Stoppuhr überprüft und, falls erforderlich, mit Pitch und Power korrigiert.
Mit konstantem Heading wird zunächst mit 500 ft/min um 500 ft gesunken und wieder auf die Ausgangshöhe zurückgestiegen. Danach wird mit 400 ft/min 400 ft gesunken und gestiegen bis die Übung nach einem Steigflug mit 200 ft/min in der Ausgangshöhe beendet wird.
Die Übung kann erweitert werden, indem bei Beginn des Sinkfluges ein Standard Rate Turn eingeleitet wird, der bei Beginn des folgenden Steigfluges mit einem Kurvenwechsel in die entgegengesetzte Richtung fortgesetzt wird. (Vertical "S1").
„Rated Descents“ und „Climbs“ in Verbindung mit „Rated Turns“
Diese Übung ist eine Kombination aus den o.g. Übungen und stellt hohe Anforderungen an das Koordinationsvermögen. Sowohl die Änderung in der Höhe als auch die Drehgeschwindigkeit werden über die Stoppuhr koordiniert. Zur Vereinfachung kann die Übung zunächst mit einem stabilisierten Sinkflug begonnen werden. Die Drehung wird dann beim Durchfliegen einer geraden Höhe eingeleitet. Mit zunehmender Übung werden die Sink- und Steigflüge jeweils zusammen mit den Standard Rate Turns eingeleitet.
„Horizontal Flight“ und „Rated Descents“ mit unterschiedlichen Konfigurationen
Diese Übung soll den Flugschüler auf die verschiedenen Flugzustände, wie sie bei Anflügen nach Instrumenten vorkommen, vorbereiten. Die beschriebene Übung wird schrittweise durchgeführt und das Flugzeug in jeder Phase stabilisiert und ausgetrimmt, ehe die nächste Phase eingeleitet wird.
Die Geschwindigkeit wird zunächst unterhalb Vfe auf Holding Speed reduziert und die Landeklappen in die Stellung gebracht, mit der ein Anflug nach Instrumenten begonnen werden soll (Intermediate Approach Configuration). Das Flugzeug wird in der zu der Klappenstellung gehörenden Geschwindigkeit stabilisiert und ausgetrimmt (Intermediate Approach Speed). Danach wird durch Ausfahren des Fahrwerkes bei gleichzeitiger Verringerung der Pitch ein Sinkflug mit 500 ft/min und konstanter Geschwindigkeit eingeleitet. Nachdem das Fahrwerk ausgefahren und verriegelt ist, werden die Landeklappen in die für einen Anflug erforderliche Stellung gebracht und die Geschwindigkeit auf die dazugehörige Vtarget (Vref + 5 kts) reduziert und ausgetrimmt.
Die Übung wird mit einem Go-Around und einem Steigflug mit Initial Climb Speed bendet.
DerLevel Off erfolgt in einer vorbestimmten Höhe mit z.B. Cruising Speed.
1.12 „Go-Around“ aus unterschiedlichen „Approach Configurations)
Ein Go-around ist ein normales Manöver, das ohne Zögern angewendet werden muß, wenn, aus weichen Gründen auch immer, eine sichere Landung in Frage gestellt ist.
Da bei einem Go-Around Änderungen sowohl der Fluglage, der Geschwindigkeit wie auch der Konfiguration in Bodennähe durchgeführt werden, muss dieses Manöver sicher beherrscht und deshalb häufig geübt werden.
Wird ein Go-around erforderlich, muss sofort Full- oder Go-around Power (im Flugtraining Climb Power) gesetzt und auf die erforderliche Steigfluglage (Climb Attitude) rotiert werden. Die Landeklappen werden dann in die für den Go-around erforderliche Stellung gebracht. Dabei ist darauf zu achten, dass die dafür erforderliche Mindestgeschwindigkeit nicht unterschritten wird. Wenn Höhenmesser und Variometer eine positive Steigrate anzeigen, wird das Fahrwerk eingefahren. Nach Erreichen einer sicheren Höhe, wird im Steigflug beschleunigt. Bei Vref für O°-Klappen werden diese ganz eingefahren. Im weiteren Steigflug wird auf die Initial Climb Speed beschleunigt und oberhalb von 400ft über Grund die Climb Power gesetzt. Entsprechend der Situation wird entweder in die Platzrunde eingeflogen, dem Missed-Approach Procedure oder den Anweisungen des Radar-Lotsen gefolgt. Mit den After Take-Off Items und der Checkliste ist der Go-around abgeschlossen.
1 Fluggeschwindigkeit
auf Anfluggeschwindigkeit herabsetzen und Landeklappen
auf
Anflugstellung ausfahren
2 Standard-Rechts- oder Linkskurve
(3°/sec)
3 Gegenkurs 270° für 1 Minute
4 Standard
Kurve, Fahrwerk ausgefahren und Sinkflug einleiten, Sinkrate 500
ft/min
5 Endkurs 090 für 1 Minute, Sinkrate 500 ft/min
6
Angenommene Sinkflugmindesthöhe 1000 ft unter der ursprünglichen
Anflughöhe
und diese 15 sec lang einhalten
7
Durchstarten
8 Steigflug mit bestem Steigwinkel (Vx)
Bei mehrmotorigen kolbengetriebenen Flugzeugen muss der Flug mit einem ausgefallenen Triebwerk mit dem Ziel geübt werden, das Flugzeug in diesem Zustand unter Beachtung der Leistungsgrenzen zu beherrschen. Dies geschieht durch Zurücknehmen der Leistung des betreffenden Triebwerkes auf eine den Feather-Zustand simulierende Kombination von Drehzahl und Ladedruck (Zero Thrust Condition).
Das Abstellen eines Triebwerkes zur Simulation eines Triebwerkausfalles ist nicht zulässig.
Soll das Abstellen und Wiederanlassen eines Triebwerkes geübt werden, ist eine Mindesthöhe von 4000 ft über Grund einzuhalten. Das Triebwerk muss sofort nach der Durchführung des Notverfahrens wieder angelassen werden. Ein Überfluten des Triebwerkes ist zu vermeiden. Vor einer Leistungssteigerung nach dem Wiederanlassen muss eine ausreichende Betriebstemperatur erreicht sein.
Vor der Durchführung von Verfahren mit simuliertem Ausfall eines Triebwerkes ist es notwendig, anhand der Daten aus dem Flughandbuch die Leistungsgrenzen (Masse, Dichtehöhe, Steigfähigkeit) zusammen mit dem Flugschüler zu ermitteln und bei der Durchführung der Verfahren besondere Sorgfalt anzuwenden.
Insbesondere ist darauf zu achten, dass die Mindestgeschwindigkeit V2 beim Start und Vmca +10kt beim Anflug mit anschließendem Durchstarten mit simuliertem Ausfall eines Triebwerkes nicht unterschritten werden (siehe LuftPersV Heft 4, Anlage 5 zu 16/A 'Besondere Hinweise, JAR 23).
Es dürfen
keine Kurven um ein stillgelegtes inneres Triebwerk geflogen
werden!
Beim Flug einer Kurve mit simuliert stillgelegtem
Kurven inneren Triebwerk ist äußerste Vorsicht anzuwenden
und es müssen die aerodynamischen Eigenschaften des Flugzeuges
und die Leistungsfähigkeit des verbliebenen Triebwerks besonders
beachtet werden. Diese Übungen dürfen nicht unter 4.000 ft
GND durchgeführt werden..
Wenn bei mehrmotorigen Propellerflugzeugen beide Triebwerke in eine Richtung drehen, spricht man dann von einem kritischen Triebwerksausfall, wenn. das der Drehrichtung der Triebwerke entgegengesetzte Triebwerk ausfällt (Rechtsdrehende Triebwerke, Motorausfall links und umgekehrt). Asymmetrie und Torque Effect wirken hier in die gleiche Richtung.
Der Fluglehrer nimmt nach sorgfältiger Beurteilung der Situation die Leistung eines Triebwerks zurück.
Der Flugschüler soll laut und deutlich das ausgefallene Triebwerk benennen und die Flugrichtung beibehalten. Dies erfolgt zunächst mit dem Querruder in Richtung zum laufenden Triebwerk, um das entstehende Rollmoment um die Längsachse auszugleichen. Möglichst gleichzeitig erfolgt eine Korrektur mit dem Seitenruder in Richtung zum laufenden Triebwerk mit dem Ziel, im Geradeausflug das Querruder soweit wie möglich in die Neutral Stellung zu bringen, ohne dass das Flugzeug schiebt. Auf dem laufenden Triebwerk wird vorsichtig volle Leistung gesetzt. Bei einigen Flugzeugen reicht die Wirkung des Seitenruders nicht aus, die entstandene Asymmetrie auszugleichen. Hier muss zusätzlich mit dem Querruder so viel Bank eingenommen werden, dass das Flugzeug geradeaus fliegt.
Falls erforderlich muss auf die Vmca beschleunigt werden. Um dies zu erreichen, kann es notwendig sein, die Geschwindigkeit im Sinkflug aufzubauen. Die Vmca ist die geringste Geschwindigkeit, bei der sich das Flugzeug mit einem stillgelegtem Triebwerk, das andere auf voller Leistung, im Flug noch kontrollieren lässt.
Die erforderlichen Verfahren werden durch den Flugschüler laut angesagt und die Handgriffe zum 'Stilllegen' des defekten Triebwerkes simuliert. Dabei dürfen die betreffenden Bedienhebel nur berührt, aber nicht betätigt werden. Der Fluglehrer muss durch manuelles Blockieren der Bedienhebel eine Fehlbedienung verhindern.
Bei Propellertriebwerken muss die Drehzahl so vorgewählt werden, dass beim Setzen der vollen Leistung das Triebwerk nicht überladen wird.
Muss bei einem (simulierten) Triebwerksausfall ein Go around geflogen werden, ist darauf zu achten, dass hierbei die Propellerverstellung des in Zero Thrust Condition befindlichen Triebwerkes nicht auf kleine Steigung verstellt wird, da sonst der Widerstand an diesem Triebwerk so groß werden kann, dass das Flugzeug unkontrollierbar wird.
Detaillierte und bindende Informationen müssen dem Handbuch des betreffenden Flugzeugtyps und dem Handbuch für die Ausbildung auf mehrmotorigen Flugzeugen entnommen werden.
Die in den hier beschriebenen Manövern angegebenen Werte beziehen sich auf das Muster PA 28R-200. Die Übungen werden auf den anderen Ausbildungsmustern entsprechend deren Leistungsdaten geflogen. Es soll die Früherkennung von überzogenen Flugzuständen und das Wiederherstellen eines sicheren Flugzustandes mit minimalem Höhenverlust geübt werden. Vor allen Manövern wird der Heading Bug auf das anliegende Heading gesetzt und die folgenden Checks werden durchgeführt:
Min. height 3000 ft GND - IAS 100 kts - Cockpit secure - Prop 2500 RPM - Mixture rich Fuel Pump on - Area clear - Landing Light on.
Nach Beendigung eines Manövers wird das Flugzeug auf vorgegebener Höhe, Kurs und Geschwindigkeit in den Ausgangszustand gebracht und mit der Ansage z.B. "Slow flight completed" beendet.
Condition:
Power idle (just above gearwarning): Flaps up - Gear up - Bank
0°
Maintain heading and altitude, trimspeed = 80 kts (Vref
0°-flaps). At first indication of stall (stall warning of buffet)
-61 kts: Set smoothly full power and lower the nose to the horizon.
At Vref (80 kts), establish climb attitude and set climb power. Climb
to initial altitude, level off and reestablish normal speed. Maximum
allowable altitude loss during the recovery is 200 ft.
Condition:
Power 12" - Flaps 10° - Gear down - Bank 15° or
0°
Maintain altitude, trimspeed = 77 kts (Vref 10°Flaps).
At first indication of stall (stall warning of buffet) ~58 kts: Full
power, lower the nose to the horizon and level wings. At Vref (77kts)
start climb to initial altitude: Positive rate of climb, gear up, at
80 kts (Vref 0° flaps) select flaps 0° set climb power and
continue climb to initial altitude. Level off and establish normal
speed. Maximum allowable altitude loss during the recovery is 200 ft.
Condition:
Power 15" - Flaps 40° - Gear down - Bank 0°
Maintain
heading and altitude, trimspeed = 72 kt (Vref 40° flaps). At
first indication of stall (stall warning of buffet) ~55 kts: Full
power, check that pitch does not increase while adding power. Aim for
minimum loss of altitude (max 50 ft), try to fly the a/c out of the
stall in level flight. Decrease Pitch as airspeed increases. The
recovery is complete when Vref (72 kts) is reached. Perform a go
around or clean up in level flight and climb to initial
altitude.
Anmerkung:
Beim Setzen der Power muss darauf geachtet werden, dass der Anstellwinkel nicht weiter erhöht wird und das Flugzeug dadurch noch langsamer wird und in einen überzogenen Flugzustand kommt. Bei der Recovery soll die Attitude mit zunehmender Geschwindigkeit so verringert werden, dass die Höhe gehalten wird, zumindest soll keine weitere Höhe verloren werden.
Initial
condition: Power 12" - Bank 0°
Maintain altitude.
Apply power to maintain 72 kts (Vref 40°). Fly shallow level
turns and climbing and descending turns with 500 fpm rate of climb or
descent and max. 15° bank. lf climb or descent rate is limited by
performance, the airspeed must be given priority. Feel the aircraft
and keep the ball centered. Accelerate in level flight or perform a
go around.
Recovery from Unusual Attitude
Mit dieser Übung
lernt der Flugschüler ein durch Unachtsamkeit, Turbulenz oder
aus anderen Gründen in eine ungewöhnliche Fluglage
gekommenes Flugzeug nur mit Hilfe der Instrumente wieder in eine
normale Fluglage zu bringen.
Ohne dass der Flugschüler
auf die Instrumente sieht, bringt der Fluglehrer das Flugzeug in eine
ungewöhnliche Fluglage und übergibt es dem Flugschüler
mit dem Kommando "You have Control". Dieser soll nun das
Flugzeug ohne Sicht nach außen nur mit, Hilfe der Instrumente
in eine normale Lage bringen.
Die Recovery erfolgt bei
Sinkfluglagen in der Reihenfolge
Power - Bank – Pitch
Zuerst wird die
Triebwerksleistung soweit reduziert, dass ein Überschreiten der
Va nach Möglichkeit vermieden wird. Gleichzeitig wird die Bank
und danach, wenn die Tragflächen waagerecht sind, die Pitch nach
dem künstlichen Horizont korrigiert. Nachdem eine normale
Fluglage erreicht ist, wird die erforderliche Triebwerksleistung
gesetzt. Dabei ist es wichtig, vor dem Hochziehen aus einer Nose-
down Attitude jede Kurve zu beenden, da sich sonst Erdbeschleunigung
und Zentrifugalkraft addieren.
Bei Steigfluglagen erfolgt die
Recovery in der Reihenfolge
Pitch - Power - Bank
Zur Korrektur der Fluglage wird zunächst die Pitch mit Hilfe des künstlichen Horizontes in eine normale Lage gebracht; gleichzeitig wird die Triebwerksleistung erhöht. Erst nach Erreichen einer sicheren Geschwindigkeit wird die Bank nach dem künstlichen Horizont korrigiert.
Bei dieser Übung
wird der Ausfall vornehmlich des künstlichen Horizontes und/
oder des Directional Gyro (DG) durch Abdecken des jeweiligen
Instrumentes simuliert.
Bei Ausfall des künstlichen
Horizontes erfolgt die Kontrolle der Pitch durch den Höhenmesser
und den Fahrtmesser, wobei das Variometer lediglich zum Erkennen
einer Tendenz dient. Der Versuch das Variometer auf 0 zu halten, hat
ein Überkorrigieren um die Querachse zur Folge.
Die
Kontrolle der Querneigung erfolgt Über den Turn and Bank
Indicator oder den Turn Coordinator. Es ist zu beachten, dass beide
Instrumente nur die Drehgeschwindigkeit und Richtung des Flugzeuges
um die Hochachse anzeigen. Größe und Richtung des
Ausschlages lassen nur bedingt auf die Querneigung des Flugzeuges
schließen.
Ein Ausfall des DG ist weitaus schwieriger zu
meistern. Kursänderungen müssen mit Standard Rate geflogen,
und mit der Stoppuhr und dem Notkompass kontrolliert werden. Dabei
ist auf den Kompassdrehfehler zu achten. Der neue Kurs muss bei
ruhiger Fluglage am Notkompass überprüft werden. Muss mit
einem ausgefallenen DG ein Anflug in IMC durchgeführt werden,
sollte der Anflug möglichst an einem Flugplatz mit Radarhilfe
erfolgen.
Steilkurven nur nach
Instrumentenflugbedingungen werden normalerweise mit 45°
Querneigung geflogen. Da sich die Stalling Speed bei einer
Querneigung von 45° um 20% erhöht, muss die Übung mit
einer sicheren Geschwindigkeit geflogen werden. Die Holding Speed ist
hier als geringste zulässige Geschwindigkeit anzusehen.
Zusätzlich erhöht sich der Widerstand. Daher ist, wenn die
Ausgangsgeschwindigkeit beibehalten werden soll, erheblich mehr
Triebwerksleistung als im Geradeausflug erforderlich. Jede Änderung
in der Querneigung macht sich wegen der starken Änderung von
Auftrieb und Widerstand sofort in der Pitch und damit in Höhe
und Geschwindigkeit bemerkbar. Sind während des Steep Turns
größere Sinkraten entstanden, sollte zunächst die
Querneigung verringert und danach mit dem Höhenruder die Pitch
korrigiert werden. Da die Kreiselwirkung des Propellers bei in
Flugrichtung rechtsdrehenden Motoren in der Linkskurve ein
zusätzliches Pitch Down Moment erzeugt, ist hier ein größerer
Höhenruderausschlag erforderlich als in der Rechtskurve, wo ein
Pitch Up Moment erzeugt wird, welches das durch die Querneigung
entstehende Moment teilweise ausgleicht.
Da der künstliche
Horizont bei steileren Kurven präzessiert, muss hauptsächlich
der Höhenmesser zur Kontrolle der Pitch und der Höhe
verwendet werden.
Grundlegende Informationen zum systematischen Umgang mit Navigationsgeräten
Der Heading Bug im
Horizontal Situation Indicator (HSI) sollte immer so verwendet
werden, als würde damit das Flugzeug über einen Autopiloten
gesteuert oder durch ein Flight Guidance System in der Heading Mode
geführt.
Der Course Pointer wird entsprechend der
Richtung des Flugzeuges auf einem Radial zur VOR eingestellt: Soll
auf einem Radial inbound geflogen werden, so wird der Course Pointer
in Richtung zur VOR, also TO, eingestellt. Dementsprechend wird, wenn
auf einem Radial outbound geflogen werden soll, am Course Pointer
FROM vorgewählt.
Wird mit einem Omni Bearing Indicator
(OBI) gearbeitet, erfolgt die Vorwahl des Magnetic Bearing
entsprechend, da das Gerät nur so eine Kommandoanzeige liefert
(Die Course Deviation Bar zeigt über die Ablage von der Mitte
des OBI in weiche Richtung eine Korrektur erfolgen muss).
Bei
gerasteter ILS Frequenz zeigt der Course Deviation Indicator,
unabhängig davon, wie der Course Pointer eingestellt ist, die
Ablage vom Localizer immer zur gleichen Seite an. Wird am Course
Pointer der Backcourse eingedreht, wird der CDI ein Anzeigegerät.
(Die Course Deviation Bar zeigt über die Ablage von der Mitte
des HSI auf welcher Seite des Localizer sich das Flugzeug befindet)
Deshalb muss, wenn ein Backcourse Approach geflogen werden soll - um
eine Kommando Gerät zu erhalten - im Horizontal Situation
Indicator immer der ILS- Frontcourse eingestellt werden.
Ein
OBI mit 'gerasteter ILS Frequenz ist unabhängig davon, weicher
Kurs vorgewählt wurde, nur dann ein Kommandogerät, wenn in
Richtung des ILS Frontcourse geflogen wird. Er ist immer dann ein
Anzeigegerät, wenn in Gegenrichtung zum ILS Frontcourse geflogen
wird, wie es bei einem ILS Backcourse Anflug der Fall ist.
Beim
Einstellen einer VOR oder ILS Station auf einem Navigationsempfänger
ist grundsätzlich auf dem dazugehörigen HSI oder OBI das
entsprechende Radial oder der Frontcourse einzudrehen und zu
überprüfen, ob die Anzeige korrekt ist. Danach muss die
Kennung ganz abgehört und die Station identifiziert
werden.
Auch bei einem NDB wird die Richtung der Anzeige
überprüft. und die Station mit der Kennung identifiziert.
Die nachstehenden
Verfahren können unter Verwendung eines NDB oder einer VOR
geflogen werden.
Unter Homing versteht man das Ansteuern eines
bestimmten Punktes, überwiegend NDB oder Direction Finder (DF),
auch Homer genannt. Der Windeinfluss wird nicht berücksichtigt,
die Flugzeuglängsachse weist ständig zum Ziel. Durch die
Windversetzung nähert sich das Flugzeug der Station auf
gekrümmter Flugbahn, der sogenannten Hundekurve.
Mit Tracking wird das
Erfliegen einer stehenden Peilung bezeichnet.
Bei diesem
Flugverfahren wird unter Berücksichtigung des Windes durch den
Wind-Correction-Angle (WCA) mit Hilfe einer VOR oder eines NDB auf
einem Sollkurs, also einem Magnetic Bearing inbound (QDM) oder
outbound (QDR) geflogen. Der WCA kann berechnet, geschätzt oder
erflogen werden. In jedem Fall darf sich das Flugzeug nicht
nennenswert vom Sollkurs entfernen (+/- 5°). Eine Korrektur
zurück zum Sollkurs muß mindestens den WCA und eine
Korrektur in Größe der Ablage vom Sollkurs (Peilsprung)
enthalten.
Gesarntkorrektur = > Peilsprung +/- WCA
Eine stehende Peilung ist dann erreicht, wenn mit korrektem WCA auf Sollkurs geflogen wird.
Unter Angle of Lead versteht man den Winkel, um den eine Kurve vor einem Sollkurs begonnen werden muss, damit dieser beim Einkurven nicht überschossen wird. Dieser Winkel ist abhängig von der Entfernung zum Funkfeuer, der erforderlichen Kursänderung und von dem Radius der Kurve, also der Groundspeed.
Bei bekannter Zeit
(t) zur Station kann der Angle of Lead wie folgt berechnet
werden:
Erforderliche Angle of Lead
Kursänderung AoL
90° 20 * t
[min]
60° 10 * t [min]
30° 5 * t [min]
Ist die Distanz zum Funkfeuer bekannt:
Angle of Lead = (GS / 3) / Distance [NM]
Ist eine Kursänderung von weniger als 90° erforderlich, so verringert sich der AoL entsprechend:
Erforderliche
Kursänderung
Angle of Lead *
60° 0,5
45°
0,3
30° 0,1
In der Ausbildung kann mittels Time-Distance Checks der Abstand zu einer Station bestimmt werden. Im fliegerischen Alltag kommt der T-D Check in der unten beschriebenen Form nicht vor. Es sind jedoch Situationen denkbar, in denen die Kenntnis des Verfahrens nützlich sein kann.
1 Zunächst das
IST Magnetic Bearing inbound (QDM) oder Radial festzustellen und
auf
MH = QDM +/- 80' oder Radial +/- 100° einkurven.
2 Auf diesem
MH erneut QDM bzw Radial feststellen und die Stoppuhr anlaufen
lassen.
3 Nach Änderung des QDM bzw. Radial, normal sind 10°
Peilsprung, die Stoppuhr anhalten.
4 Falls zur Station geflogen
werden soll, ist unverzüglich zur Station hin einzukurven und
auf
dem dann anliegenden QDM oder Radial inbound zu tracken.
Da
die GS beim T/D Check von der GS zur Station durch den Windeinfluss
stark abweichen kann, ist dies bei der Flugzeitberechnung zu
berücksichtigen (Schätzung).
Time to Station [min] = Time [sec] for Bearing Change ; Bearing Change (norm. 10°)
Dieses Verfahren
ermöglicht eine Abstandsbestimmung im Vorbeiflug an einer
Station.
Zur Abstandsbestimmung wird die Groundspeed auf dem
aktuellen Track benötigt. Die Bestimmung der GS erfolgt entlang
dem MC, über Entfernung und Zeit zwischen letztem Checkpoint und
dem ersten MB to Station (QDM). Dieses hat einen Winkel von 45°
zum geflogenen MC.
Bei Durchlauf des ersten MB (45° zum
MC) beginnt die Zeitnahme.
Das zweite MB zur Station wird so
gewählt, daß es zum anliegenden MC einen Winkel von 90°
bildet. Der Peilsprung beträgt also 45°.
Die
Zeitnahme endet bei Durchlauf des zweiten MB (90° zum MC).
Die
Zeit zwischen beiden MB entspricht dem zeitlichen Abstand zur
Station.
Time to Station = Time for Bearing Change
Zur
Abstandsbestimmung wird über die Groundspeed die Distanz
errechnet. In der. Karte kann nun die Ablage vom geplanten Kurs
ermittelt werden.
Dist to Station [NM] = GS [KTS] / 60 * Time for Bearing Change [min]
Diese Methode bietet sich beim Anflug auf eine Station an, wenn die verbleibende Zeit bis zum Überflug festgestellt werden soll.
1 Zunächst das
IST Magnetic Bearing inbound (QDM) oder Radial feststellen und
auf
MC = QDM +/- 30' einkurven.
2 Auf diesem MC erneut QDM bzw. Radial
feststellen und die Stoppuhr anlaufen lassen.
3 Es kann nach einer
bestimmten Zeit ein Peilsprung abgelesen werden oder ein
Peilsprung
abgewartet und die dafür erforderliche Zeit abgelesen werden.
4
Falls zur Station geflogen werden soll, ist unverzüglich zur
Station hin einzukurven
und auf dem dann anliegenden QDM oder
Radial inbound zu tracken.
Da die GS beim T/D Check von der GS zur
Station durch den Windeinfluß abweichen kann, ist hierauf bei
der Flugzeitberechnung Rücksicht zu nehmen (Schätzung).
Es ergeben sich folgende Näherungsformeln:
Time to Station [min] = Time [sec] for Bearing Change / (2 * Bearing Change)
oder
Time to Station [min] = (Time [min] for Bearing Change * 30) / Bearing Change
Falls der Peilsprung 30° beträgt, ist die DIST zur Station gleich der DIST des Peilsprungs.
Unter einer Interception versteht man in der Funknavigation den Anflug auf einen vorgegebenen Kurs bezogen auf eine Funkstation. Dies kann bei einem NDB ein bestimmtes Magnetic Bearing inbound (QDM) oder ein Magnetic Bearing outbound (QDR) sein. Beim Fliegen nach einer VOR spricht man von Radial inbound oder Radial.
Anmerkung:
Ein Radial verläuft immer outbound, daher nur "Radial", im Gegensatz zum Radial inbound.
Mit der Interception soll der anzuschneidende Kurs möglichst schnell erreicht werden. Bei Interceptions inbound soll sich das Flugzeug während des Verfahrens der Station nähern. Wurde bisher auf einem QDM, QDR oder Radial (IST) geflogen, so ist dieses, wenn ein neues (SOLL) QDM, QDR oder Radial angeflogen werden soll, in einem Winkel von mindestens 30° zu verlassen. Das Intercept-Heading errechnet sich aus der Differenz (D) zwischen dem IST-Magnetic Bearing und dem SOLL-Magnetic Bearing plus 30°. Da das anzuschneidende MB nach Möglichkeit nicht überschossen werden soll, ist beim Einkurven auf das MH in- oder outbound der Angle of Lead zu berücksichtigen.
Ist die Summe aus D + 30° größer als 90°, wird der neue Sollkurs mit maximal 90° angeschnitten.
Die nachfolgend genannten Berechnungen des Intercept-MH sollen helfen, den Sollkurs möglichst schnell zu erreichen.
Für alle Interceptions in- und outbound gilt:
Intercept MH = SOLL MB +/- (D+30°)
Nur für Interceptions inbound kann auch folgende Formel angewendet werden:
Intercept MH = IST QDM +/- 30°
Um das +/- Vorzeichenproblem zu lösen ein Merksatz IST QDM größer als SOLL QDM, dann Intercept MH größer als IST; IST QDM kleiner als SOLL QDM, dann Intercept MH kleiner als IST.
Um das +/- Vorzeichenproblem für Interceptions outbound zu lösen der Merksatz SOLL QDR größer als IST QDR, dann Intercept MH größer als SOLL; SOLL QDR kleiner als IST QDR, dann Intercept MH kleiner als SOLL
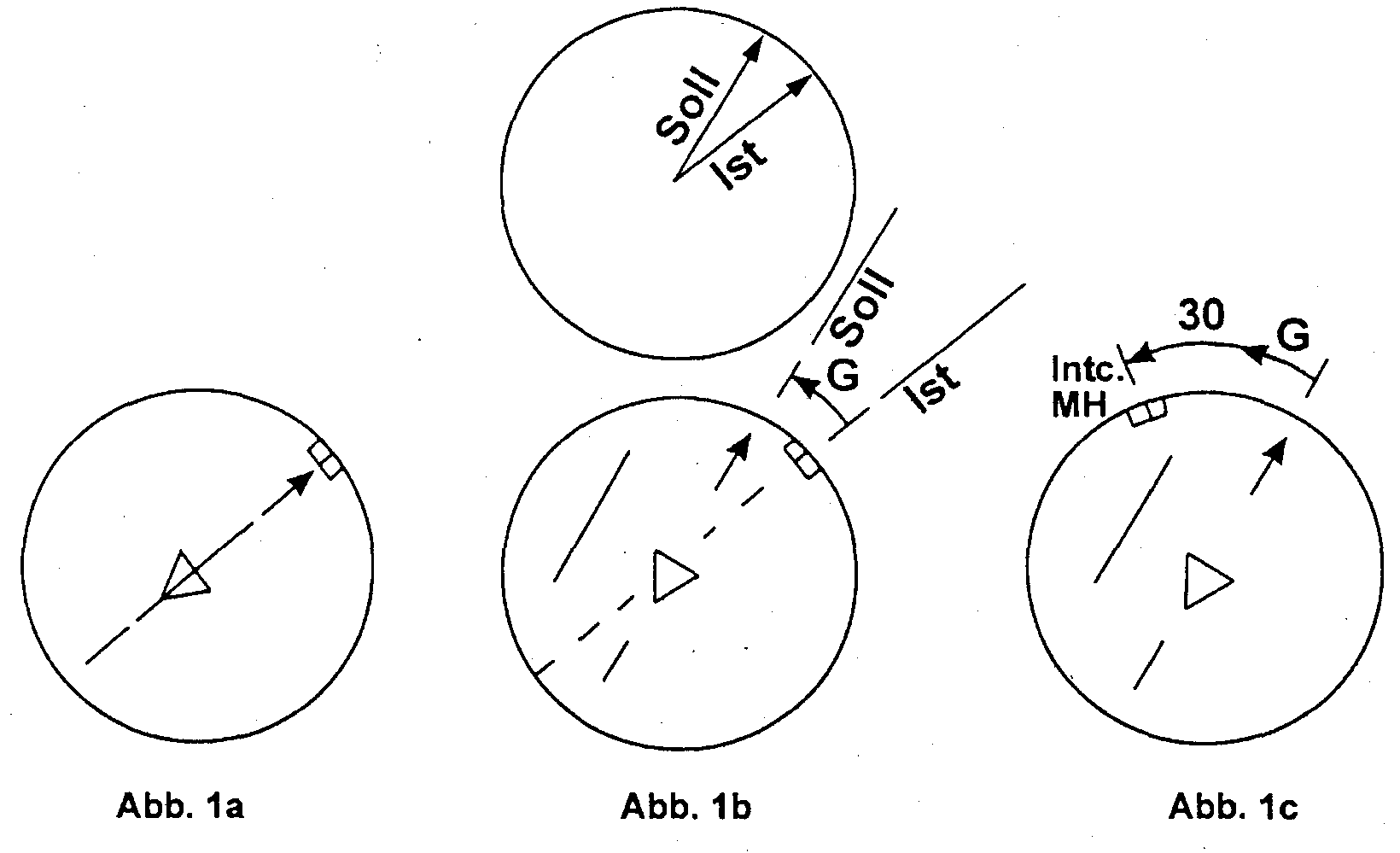
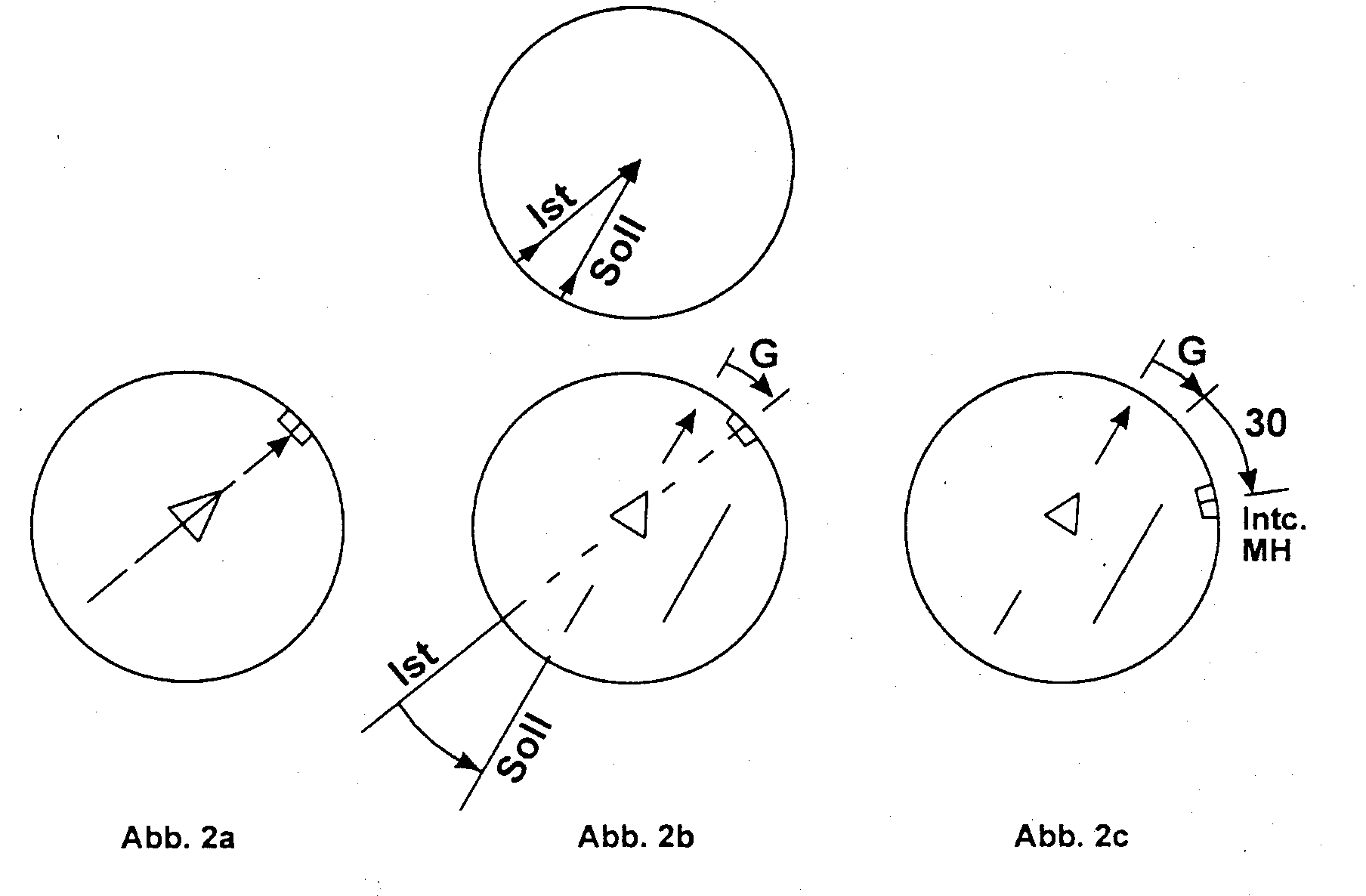
Ablaufhilfe
Zur Unterstützung
der räumlichen Vorstellung durch eine optische Darstellung kann
bei allen Interceptions, sowohl VOR als auch NDB, wie folgt
vorgegangen werden:
- Magnetic Bearing bzw. Radial (IST)
feststellen und mit dem Heading Bug markieren. Abb. la + 2a auf der
nächsten und übernächsten Seite
- SOLL Radial mit
dem Course Pointer vorwählen. Die Spitze des Course Pointers
wird immer entsprechend der Aufgabenstellung entweder zur Station
(Radial inbound, QDM) oder von der Station weg (Radial, QDR)
eingestellt.
Abb. 1 b + 2b
- Die Differenz (G) zwischen IST-
und. SOLL- Standlinie wird hierdurch optisch dargestellt und kann
zwischen dem Heading Bug und dem Course Pointer abgelesen
werden.
Abb. 1 b + 2b
- Der errechnete Intercept Angle (D+30)
wird bei allen VOR Interceptions an der Pfeilspitze des Course
Pointers (Soll) in Richtung der Ablage am CDI angebracht (Intercept
MH).
Abb.lc + 2c
Beim Anschneiden einer Standlinie an einem NDB kann ebenso verfahren werden. Der errechnete Intercept Angle wird am Course Pointer (Soll), sofern dieser nicht anderweitig zur Navigation benötigt wird, wie folgt angebracht:
- Bei outbound
Interceptions, von der IST Standlinie (Heading Bug) aus gesehen, in
Richtung der Spitze des Course Pointers. Die Anzeige der CDI-Bar ist
hierbei natürlich ohne Bedeutung.
Abb. lb + 1c
- Bei
inbound Interceptions, von der IST Standlinie (Heading Bug) aus
gesehen, in Richtung des Endes des Course Pointers.
Abb. 2b + 2c
Dabei ist es für die räumliche Vorstellung hilfreich, das NDB in die Mitte des HSI zu projezieren. Damit können die Aufgaben nach einiger Übung auch ohne die Verwendung des Course Pointers gelöst werden. Abb lb oben outbound und 2b oben inbound.
Bestimmung der Richtung der Interception VOR und NDB Outbound
Bestimmung der Richtung der Interception VOR und NDB Inbound
Soll nach dem Überflug einer VOR ein Radial oder nach Oberflug eines NDB ein vorgegebener outbound Magnetic Track angeschnitten werden, so ist nach Überflug des Funkfeuers auf dem kürzesten Weg auf den outbound MC +/- 30' einzudrehen, um so das Radial oder den outbound MT anzuschneiden. Dieses ist z. B. in einem Instrumentenanflug erforderlich, wenn die überflogene Station ein Initial Approach Fix für das Anflugverfahren ist.
Wird auf einer Flugroute eine Station oder ein Fix mit einer nachfolgenden Kursänderung angeflogen, so ist die Kursänderung so rechtzeitig vor dem Fix durchzuführen, dass die nachfolgende Kurslinie nicht überschossen wird.
Holding ist der Begriff für ein Warteflugverfahren, im Bezug auf einen definierten Punkt (Holding Fix), der durch ein NDB eine VOR oder einen DME Fix definiert werden kann. Das Flugzeug darf den Bereich des Holding nicht verlassen.
Ein Holding Pattern wird definiert über den Bezugspunkt (Holding Fix), Richtung des Inbound- und Länge des Outbound Leg sowie der Richtung der Kurven im Holding: Left-Hand Holding bzw. Right-Hand Holding.
Alle Kurven im Holding werden mit Standard Rate (3°/sec) bis zu einem maximalen Bankangle von 25° geflogen.
Bei Windstille soll die Flugzeit auf dem Outbound Leg bis zu einer Flughöhe von einschließlich 14000 ft (4 250 m) 1 Minute, oberhalb davon 1 1/2 Minuten nicht überschreiten. Abweichungen, z.B. die Festlegung der Länge des Outbound Leg über eine DME Distanz, sind veröffentlicht.
Das Inbound Leg des Holding ist durch den Inbound MC und durch die Zeit- bzw. DME Vorgabe auf dem Outbound Leg oder durch eine DME Vorgabe auf dem Inbound leg festgelegt. Der Windeinfluss (Zeit und Abdrift) für das Outbound Leg sowie den Outboundund den Inbound Turn, kann somit nur auf dem Outbound Leg ausgeglichen werden. Auf dem Inbound Leg wird der Wind mit einfachem WCA ausgeglichen.
Lage und Länge eines Holding Pattern kann auch ganz über ein Radial und DMEDistanzen bestimmt werden:
Die Maximalgeschwindigkeiten im Holding Pattern sind abhängig vom Flugzeugtyp und der Wartehöhe:
|
PAN-OPS |
Propellerflugzeuge |
Jets |
|
Bis einschl. FL 060 |
170 |
210 |
|
>FL 060 bis einschl. FL 140 |
170 |
220 |
|
>FL 140 bis einschl FL 200 |
175 |
240 |
PAN OPS: „Procedures for Air Navigation Services, Operation of Aircraft“ (Gültig in Deutschland)
|
ICAO |
Flugzeuge Kat. A+B |
Flugzeuge Kat. C und höher |
|
Bis einschl. FL 140 |
170 |
230 |
|
>FL 140 bis einschl. FL 200 |
240 |
240 |
|
>FL 200 bis einschl FL 340 |
265 |
265 |
|
>FL 340 |
M 0,83 |
M 0,83 |
Bei Turbulenz dürfen Düsenflugzeuge nach einer ATC-Freigabe bis zu maximal 280 KIAS oder M 0,8 - das jeweils langsamere - fliegen.
Durch zeitliche
Verkürzung oder Verlängerung des Outbound Leg soll erreicht
werden, dass die vorgegebene Zeit auf dem Inbound Leg trotz
Windversatz eingehalten wird.
Nach Überflug des Fix ist
sofort (sechs Sekunden Toleranz) in Richtung des Holding auf das
Outbound MH zu kurven.
Die Outbound Time beginnt im
VOR-Holding über der Abeam Position; beim NDB-Holding in der
Abeam Position bzw. beim Anliegen des Outbound MH (Beide Bedingungen
müssen erfüllt sein). Nach Ablauf der errechneten Zeit ist
sofort (10 Sekunden Toleranz) der Turn zum Inbound Leg zu
beginnen.
Ist für den Beginn des Inbound Leg oder für
den Beginn des Turn zum Inbound Leg eine DME-Distanz vorgegeben, so
wird auf dem Outbound Leg bis zu dieser DME-Distanz geflogen, um dann
sofort (sechs Sekunden Toleranz) auf das Inbound Leg einzukurven. Das
Timing entfällt (siehe Doc. Conv. Holding Proc. Chapt 1 Seite
1.3.9).
Schema für Zeitkorrekturen für den
Windeinfluss im Holding (v = Windgeschwindigkeit in kt):
|
Windwinkel zum |
Zeit-Korrektur des Outbound
|
Zeit-Korrektur des Outbound
|
|
0°-30° Wind von vorn |
+ 1,5*v [sec] |
+ 2,0*v [sec] |
|
0°-30° Wind von hinten |
- 1,0*v [sec] |
- 1,5*v [sec] |
|
30°-60° |
+/- 1,0*v [sec] |
+/- 1,0*v [sec] |
|
60°-90° |
Nach Schätzung |
Nach Schätzung |
Hier ein einfacheres, aber ausreichendes Schema (v = Windgeschwindigkeit in kt):
|
Windwinkel zum |
Zeit-Korrektur des Outbound
|
Zeit-Korrektur des Outbound
|
|
0°-30° |
+/- 1,0*v [sec] |
+/- 1,5*v [sec] |
|
30°-60° |
+/- 0,5*v [sec] |
+/- 0,5*v [sec] |
|
60°-90° |
Nach Schätzung |
Nach Schätzung |
Im Verlauf mehrerer Holdings wird die Outbound Time so korrigiert, dass sich ein Inbound Leg von 1 Minute bzw. 1,5 Minuten ergibt.
Korrektur für den Seitenwind im Holding
Nach Beendigung des Inbound Turn ist mit einfachem WCA auf dem Inbound MC zur Station (Fix) zu fliegen. Seitenwindkorrekturen für die anderen drei Teile des Holdings sind nur auf dem Outbound Leg möglich. So ergibt sich
Outbound MH = Outbound MC ± 3 * WCA.
Dies gilt für
das 1-Minuten-Holding. Im 11/2-Minuten-Holding wird der zweifache WCA
angebracht.
Wenn nach Beendigung des Outbound Turns die Abeam
Position noch nicht erreicht ist und sich ein einfacher WCA von 5°
und größer ergibt, sollte bis zur Abeam Position bereits
mit einfachem WCA geflogen werden.
Auf dem Inbound Leg erfolgt
die Kontrolle der Zeitkorrektur und der WCA-Vorgaben. Dazu wird die
Stoppuhr gestartet
- Beim Anliegen des Inbound MH oder
-
Bei Beginn der Interception zum Inbound MC.
Durch die Kürze
des Inbound Leg verbleibt nur wenig Zeit für Kurskorrekturen.
Deshalb muss die Position in bezug auf den Inbound MC möglichst
frühzeitig abgeschätzt werden. Die ersten Kontrollen müssen
deshalb schon früh erfolgen. Bei Windstille bildet das QDM im
1-Minuten-HoIding zu Beginn des Inbound Turn einen Winkel von etwa
30° zum Inbound MC. Beim Kurven durch das Heading von 90° zum
Inbound MC, beträgt der Winkel etwa 15°.
Für den
restlichen Teil des Inbound Turn kann die Bank der Nadelbewegung
angepaßt werden. Dabei ist das Limit von 25° Bank zu
beachten.
Wird eine Interception des Inbound MC nötig, ist
diese im Normalfall gegen den Wind mit 45° und mit dem Wind mit
30° durchzuführen.
Korrekturen für den Seitenwind
erfolgen auf dem Inbound Leg mit einfachem WCA.
Die Entry Procedures
sind festgelegt um sicher zu stellen, daß das Flugzeug beim
Einflug in das Holding spätestens beim zweiten Überflug des
Holding Fix - in das veröffentlichte Holding gelangt und dabei
so nahe wie möglich im Bereich des Holding bleibt.
Rechtzeitig
vor Einfluss in das Holding wird auf die für das jeweilige
Flugzeug wirtschaftliche Geschwindigkeit, die Holding Speed,
reduziert und das Holding Briefing durchgeführt. Die folgenden
Punkte werden angesprochen:
- Minimum Holding Altitude
-
Inbound Track
- Direction of Turns
- Entry Procedure und
Heading
- Direction of First Turn
Berechnungen von WCA und
Time-Correction sollten frühzeitig durchgeführt werden. Es
muss so rechtzeitig vor Einflug in das Holding auf die Holding Speed
reduziert werden, dass das jeweilige Fix mit dieser Geschwindigkeit
überflogen wird. Das Timing erfolgt bei Überflug des
Holding Fix bzw. in der Abeam Position. DME-Distanzen ersetzen
gegebenenfalls das Timing.
Abhängig vom Entry Procedure
wird beim Einflug in das Holding in sinnvoller Reihenfolge:
-
die Stoppuhr gestartet Time
- auf das Entry Heading gekurvt Turn
-
am HSI die CDI Nadel auf den Inbound Course eingestellt Twist
-
ATC informiert Talk
Die nachfolgend beschriebenen Verfahren
gelten für 1 und 1,5 Minuten Holdings.
Der Einflugsektor
wird durch das bei Überflug des Fix anliegende MH bestimmt. Eine
Toleranz von +/- 5° wird hierbei eingeräumt.
Gelegentlich
sind noch die Bezeichnungen Standard und Non-Standard Holding Pattern
zu finden. Unter Standard Holding Pattern versteht man ein Right-Hand
Pattern, und unter Non- Standard Holding Pattern ein Left-Hand
Pattern.
Der Anflugbereich für ein Holding Fix ist in
drei Sektoren aufgeteilt, aus denen das zugeordnete Verfahren den
kürzesten Weg in das Holding ermöglicht. Die drei Sektoren
werden durch die Grundlinie des Holding und eine Linie definiert,
welche mit der Grundlinie auf der Seite des Holdings einen Winkel von
70° bildet.
Sector 1:
(Bereich 110°) Der Anflug erfolgt von der Holding Seite zwischen
der verlängerten Anfluggrundlinie und der Begrenzung des 70°
Sektors. Es wird ein Parallel Entry geflogen.
Sector
2: (Bereich 70°) Der Anflug erfolgt von der Non Holding Seite
zwischen der verlängerten Anfluggrundlinie und der verlängerten
70° Linie. Es wird ein Offset (Tear Drop) Entry
geflogen.
Sector 3: (Bereich 180°) Der Sektor deckt
den Bereich zwischen der 70° Linie auf der Holding Seite über
die Holding Grundlinie zur Verlängerung der 70° Linie auf
der Non Holding Side ab. Es wird ein Direct Entry
geflogen
Für Anflüge auf das Holding Fix,
rechtwinklig von der Non Holding Side, kann ein Special Direct
Entry geflogen werden.
Outbound MH = Parallel Outbound MC +/- 2 * WCA
1) Bei erstem
Überflug des Holding Fix auf outbound MC +/- 2 * WCA einkurven
und Stoppuhr anlaufen lassen. Mit dem Course Selector Inbound MC
eindrehen.
2) Die Outbound Zeit wird dem Windeinfluß
entsprechend korrigiert (siehe Timing im Holding).
3) Nach Ablauf
der errechneten Outbound Zeit wird in Richtung der Holding Side
entweder direkt zum Holding Fix eingedreht, oder die Grundlinie
(Radial bzw. der inbound MC) angeschnitten. Letzteres ist dann
erforderlich, wenn sofort nach dem zweiten Überflug des Fix ein
Anflug begonnen wird.
4) Soll weiter' im Holding geflogen werden,
wird nach dem zweiten Überflug des Holding Fix in Richtung des
Holding Pattern auf den Outbound MC +/- 3 * WCA eingekurvt.
5) Die
Zeitnahme für das Outbound Leg beginnt:
VOR: Bei Passieren
der Abeam Position.
NDB: Bei Passieren der Abeam Position oder
wenn das Outbound MH anliegt, falls die Abeam Position durch
Windversetzung schon in der Kurve zum Outbound leg passiert wurde.
6)
Nach Ablauf der errechneten Zeit auf den Inbound MC einkurven und
diesen wenn erforderlich anschneiden. Auf dem Inbound MC wird der
einfache WCA angebracht.
Teardrop MH = Offset MC +/- 1 * WCA
1. Bei erstem
Überflug des Holding Fix auf Offset MC (30° zum Outbound
Course) +/- 1 x WCA einkurven und Stoppuhr anlaufen lassen.
2. Mit
dem Course Selector Inbound MC eindrehen. Wird an einer VOR geflogen,
kann der Course Selector kann auch auf den Offset MC eingestellt
werden.
3. Die Berechnung der Zeit und des WCA werden auf den
Offset MC bezogen!
4. Nach Ablauf der errechneten Zeit auf den
Inbound MC einkurven und diesen, wenn erforderlich, anschneiden.
5.
Beim zweiten Überflug des Holding Fix in Richtung des Holding
Pattern auf den Outbound MC +/- 3 * WCA einkurven. Die Berechnung der
Zeit und des WCA beziehen sich jetzt auf den Inbound MC.
6. Die
Zeitnahme für das Outbound Leg beginnt:
VOR: Bei Passieren
der Abeam Position.
NDB: Bei Passieren der Abeam Position oder
wenn das Outbound MH anliegt, falls die Abeam Position durch
Windversetzung schon in der Kurve zum Outbound leg passiert wurde.
7.
Nach Ablauf der errechneten Zeit auf den Inbound MC einkurven und
diesen, wenn erforderlich, anschneiden. Auf dem Inbound MC wird der
einfache WCA angebracht.
Outbound MH = Outbound MC +/- 3 * WCA
1. Beim ersten
Überflug des Holding Fix auf Outbound MH einkurven und dem
Holding Pattern folgen.
2. VOR: Bei Passieren der Abeam Position
Stoppuhr anlaufen lassen.
NDB: Bei Passieren der Abeam Position
Stoppuhr anlaufen lassen oder wenn das Outbound MH anliegt, falls die
Abeam Position durch Windversetzung schon in der Kurve zum
Outboundleg passiert wurde.
3. Das Outbound MH beinhaltet 3 * WCA
beim 1 min Holding, bzw.2 * WCA beim 2 min Holding.
4. Mit dem
Course Selector Inbound MC eindrehen.
5. Nach Ablauf der Zeit auf
den Inbound MC einkurven und diesen, wenn erforderlich, anschneiden.
Auf dem Inbound MC wird der einfache WCA angebracht.
Outbound MH = Outbound MC +/- 3 * WCA
Ein Sonderfall, der dann Anwendung finden kann, wenn das Fix von der Non Holding Seite mit einem Heading angeflogen wird, das einen Winkel von 90° (Toleranz +/- 20°) zur Holdinggrundlinie bildet. Sind wegen höherer Holding Speed Rate-One Turns nicht anwendbar, muß ein Direct Entry geflogen werden.
1. Bei erstem
Überflug des Holding Fix Stoppuhr anlaufen lassen und 20 sec
rechtwinklig zum Inbound MC fliegen.
2 Nach Ablauf der 20 sec auf
Outbound MH einkurven (Bedingung ist Rate One Turn) und Stoppuhr
weiterlaufen lassen.
3. Der Outbound MH beinhaltet in jedem Fall 3
x WCA bezogen auf den Inbound MC.
4. Mit dem Course Selector
Inbound MC eindrehen.
5. Beim 1-Minuten Holding beginnt der
Inbound Turn nach 90 sec +/- voller Windverbesserung, beim 11/2
Minuten Holding nach 120 sec Windverbesserung, jeweils ab Überflug
des Fix.
6. Nach Ablauf der Zeit auf den Inbound MC einkurven und
diesen, wenn erforderlich anschneiden. Auf dem Inbound MC wird der
einfache WCA angebracht.
Ein Instrument
Approach soll das Flugzeug selbst in IMC so an die Landebahn
heranführen, daß eine Landung sicher durchgeführt
werden kann.
Der gebräuchliche Ausdruck Standard
Instrument Approach bedeutet, daß das gesamte veröffentlichte
Anflugverfahren ohne Radarführung abgeflogen
wird.
Anmerkung:
Die Aussage des Lotsen "Radar
identified" im Approach garantiert nicht die Sicherung und
Führung des Fluges durch den Lotsen. Hierfür ist alleine
die Besatzung verantwortlich.
Erst unter "Radar Vector"
ist - formaljuristisch - der Lotse für die Terrain-Clearance
verantwortlich. Dies bedeutet jedoch nicht, daß dem Lotsen
blind vertraut werden sollte.
Abhängig von den am Boden
verfügbaren Anflughilfen wird zwischen Non Precision und
Precision Approaches unterschieden.
Bei Non Precision
Approaches erfolgt der Anflug herkömmlich unter Verwendung von
NDB, VOR, VOR/DME, Localizer oder Surveillance Radar (SRE) und seit
einiger Zeit mit GPS (Global Positioning System). Die Führung
erfolgt bei allen Non-Precision Approaches nur im Azimuth.
Bei
Precision Approaches erfolgt der Anflug zusätzlich mit
vertikaler Führung durch den elektronischen Gleitpfad oder durch
Precision Approach Radar (PAR).
Für Anflüge ohne
Radarführung im Endteil muss zur Kontrolle des Gleitweges ein
Fix mit Angabe der Überflughöhe vorhanden und in der
Anflugkarte veröffentlicht sein. Dies kann ein Outer-Marker,
Locator Beacon, VOR Radial oder eine DME-Distanzangabe sein.
Ein
Instrumentenanflugverfahren wird als Straight-in Approach bezeichnet,
wenn Landebahn und Landerichtung in Verlängerung des
Endanflugteiles liegen. Bei NonPrecision Approaches kann der
Endanflugkurs bis zu 30° von der Landerichtung abweichen.
Steht
das Initial Approach Fix auf der Anfluggrundlinie oder an der
Landebahn, ist ein Reversal Procedure veröffentlicht.
Stimmt
das verwendete Anflugverfahren nicht mit der vorgesehenen
Landerichtung überein, muss ein Circling Approach geflogen
werden.
Instrumentenanflugverfahren
können aus den folgenden fünf Segmenten bestehen:
Die
Arrival Route- führt zum Initial Approach Fix (IAF).
Der Initial Approach
beginnt am Initial Approach Fix und endet am Intermediate (Approach)
Fix (IF) oder an dem Punkt, an dem der Intermediate Approach Course
angeschnitten wird.
Das Initial Approach Segment ist 10 NM breit.
Die Minimum Obstacle Clearance (MOC) beträgt 1000 ft über
die Hälfte des Bereiches und geht zu den Rändern hin, in je
einem Viertel des Bereiches auf 0 ft zurück.
Der
Intermediate Approach führt vom Intermediate Fix zum Final
Approach Point (FAP-ICAO) oder Final Approach Fix (FAF-USA).
Die
Breite des Intermediate Approach Segmentes verringert sich von 10 NM
auf minimal 2 NM. Die MOC beträgt hier 500 ft.
Das
Final-Approach Segment beginnt am Final Approach Point und endet am
MissedApproach Point (MAP) beim Non Precision Approach.
Beim
Precision Approach endet das Final Approach Segment oder an der
Intersection des Glidepath mit der Decision Altitude (DA).
Die
Breite des Final Approach Segmentes beträgt beim Non Precision
Approach 2,5 NM, beim Precision Approach 2 NM. Die MOC beträgt
noch 250 ft.
Das Missed-Approach Segment beginnt am
Missed-Approach Point bzw. der Decision Altitude und endet am
Missed-Approach Fix in der vorgeschriebenen Höhe.
Zu Beginn
des Missed Approach beträgt die MOC nur 100 ft. Sie erhöht
sich im Verlauf des MA auf 170 ft.
Alle Segmente sind in der
oben beschriebenen Trogform ausgebildet Die für die jeweiligen
Segmente veröffentlichten Höhen sind Mindesthöhen und
sind bindend.